
| 太陽(yáng)能電池最大功率點(diǎn)跟蹤 |
Maximum Power Point Tracking (MPPT) |
| 在前面課件中,介紹了太陽(yáng)能電池的方位跟蹤,是通過(guò)機(jī)械運(yùn)動(dòng)跟蹤太陽(yáng)的視運(yùn)動(dòng)。本課件介紹太陽(yáng)能光伏電池的最大功率點(diǎn)跟蹤控制MPPT(Maximum Power Point Tracker)。最大功率點(diǎn)跟蹤可進(jìn)一步提高太陽(yáng)能電池的轉(zhuǎn)換效率,充分利用光伏陣列轉(zhuǎn)換的能量。 |
太陽(yáng)能電池的伏安特性分析 |
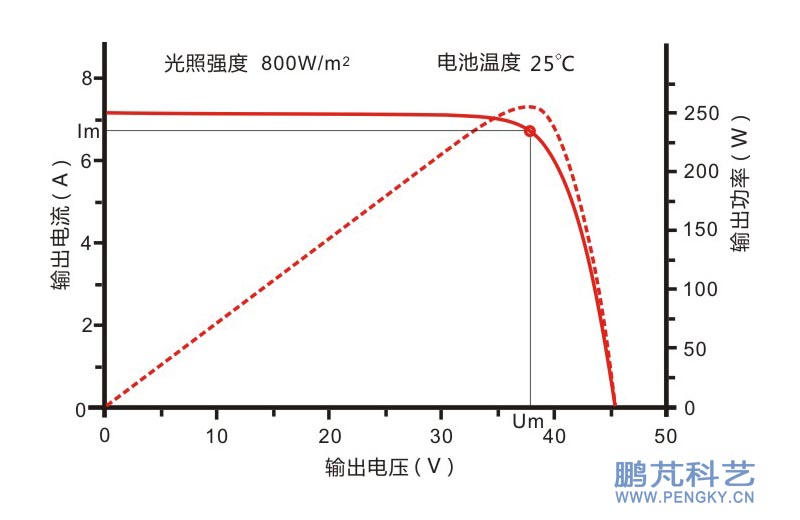
| 為什么要進(jìn)行最大功率點(diǎn)跟蹤,要從太陽(yáng)能電池的伏安特性說(shuō)起,下面以某品牌高效硅太陽(yáng)能電池組件為例進(jìn)行介紹,圖1是該組件在光照強(qiáng)度(輻照度)為800W/m2,電池溫度為25度時(shí)的特性曲線,圖中紅色實(shí)線是伏安特性曲線,紅色虛線是電壓功率曲線。在“硅太陽(yáng)能電池工作原理”一節(jié)已介紹過(guò),電池組件的輸出功率隨電壓的變化曲線按電壓功率曲線變化,在輸出電壓為Um,輸出電流為Im時(shí),輸出功率最大,此點(diǎn)稱為太陽(yáng)能電池的最大功率點(diǎn)。 |
|
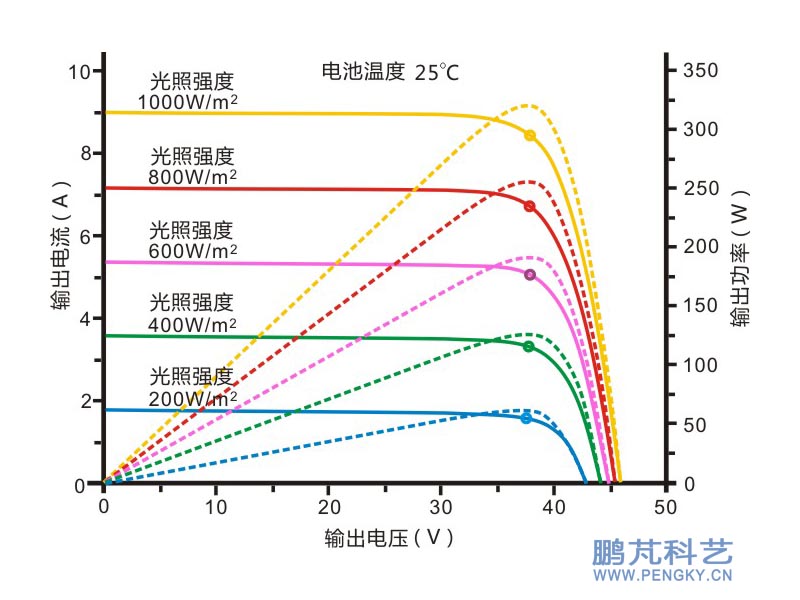
| 圖1僅是光照強(qiáng)度為800W/m2,電池溫度為25度時(shí)的特性曲線,但光照強(qiáng)度與溫度發(fā)生變化時(shí)曲線會(huì)發(fā)生變化。圖2是該電池組件在電池溫度為25度時(shí)在不同日照強(qiáng)度下的伏安特性曲線與電壓功率曲線。圖中黃色實(shí)線是光照強(qiáng)度為1000W/m2時(shí)的伏安特性曲線,黃色虛線是光照強(qiáng)度為1000W/m2時(shí)的電壓功率曲線,此時(shí)最大功率輸出為320W,在伏安特性曲線上的小圓點(diǎn)是最大功率點(diǎn)。 |
|
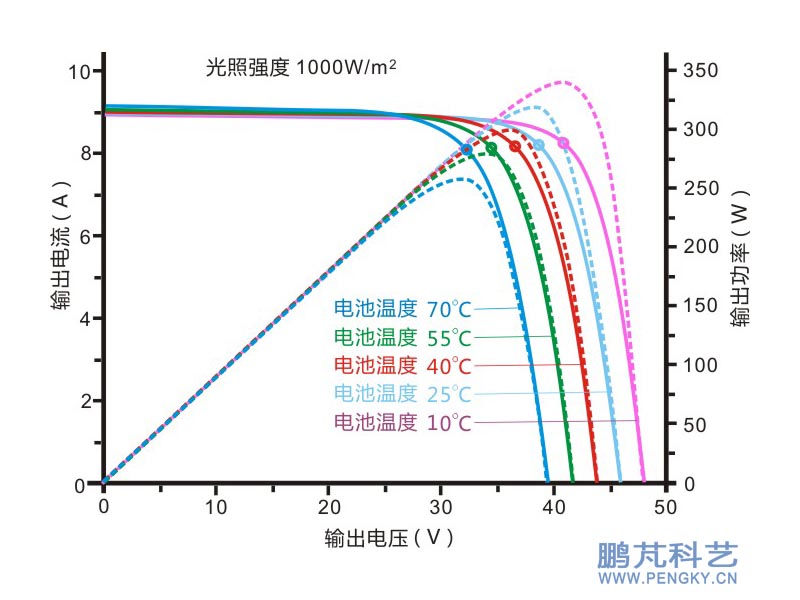
在圖2中還有幾組不同光照強(qiáng)度的曲線,例如光照強(qiáng)度為400W/m2時(shí)最大功率輸出為125W。 總的特點(diǎn)是當(dāng)光照強(qiáng)度增加時(shí),太陽(yáng)能電池的開路電壓變化不大,短路電流增加,最大輸出功率增加。 圖3是該組件在光照強(qiáng)度為1000W/m2時(shí),不同電池溫度時(shí)的電壓功率曲線。當(dāng)電池溫度為10度時(shí),其伏安特性曲線如粉紅色實(shí)線所示,電壓功率曲線如粉紅色虛線所示,此時(shí)最大輸出功率為340W;當(dāng)電池溫度為55度時(shí),其伏安特性曲線如綠色實(shí)線所示,電壓功率曲線如綠色虛線所示,此時(shí)最大輸出功率為280W。 |
|
可見其主要特點(diǎn)是電池溫度增加時(shí),太陽(yáng)能電池的開路電壓下降,短路電流稍有增加,最大輸出功率減小。 |
| 太陽(yáng)能電池最大功率點(diǎn)跟蹤 |
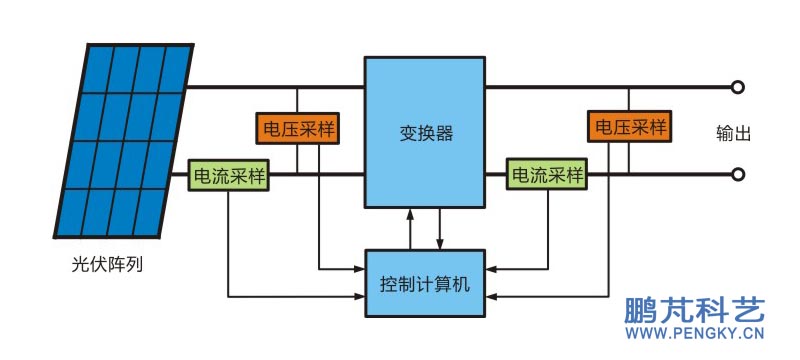
最大功率點(diǎn)跟蹤控制MPPT使太陽(yáng)能電池板能在各種不同的日照和溫度環(huán)境下有效地跟蹤最大功率點(diǎn),是使用合適的MPPT 控制算法控制電池板盡可能地工作在最大功率點(diǎn)上。本課件只就常用的3種方法的工作原理作簡(jiǎn)單介紹。 圖4是太陽(yáng)能電池最大功率點(diǎn)跟蹤控制主要組成框圖,主要通過(guò)采集電池陣列的輸出電壓與電流,根據(jù)相應(yīng)控制算法,調(diào)整變換器的輸出來(lái)改變電池陣列的輸出電壓,達(dá)到對(duì)最大功率點(diǎn)的跟蹤。變換器輸出端的電壓與電流檢測(cè)用于計(jì)算機(jī)對(duì)輸出控制的參考。 |
|
| 恒電壓跟蹤C(jī)VT(Constant Voltage Tracker ) |
在圖2中可看到,當(dāng)溫度一定時(shí),各曲線的最大功率點(diǎn)基本在一根垂直線上,只要找到這條垂直線,確定電壓值Um,通過(guò)對(duì)負(fù)載的控制使電池板輸出維持在Um,就可以保證電池板在大多數(shù)光照條件下工作在最大功率點(diǎn)。 CVT方法具有控制簡(jiǎn)單,可靠性高,穩(wěn)定性好,易于實(shí)現(xiàn)等優(yōu)點(diǎn),由于這種跟蹤方式忽略了溫度對(duì)太陽(yáng)能電池開路電壓的影響。以單晶硅太陽(yáng)能電池為例,當(dāng)環(huán)境溫度每升高1 ℃時(shí),其開路電壓下降率為0.35%~0.45%,對(duì)于四季溫差或日溫差比較大的地區(qū),該方式不能在所有的溫度環(huán)境下跟蹤最大功率。 CVT方法的優(yōu)點(diǎn):控制方法簡(jiǎn)單、穩(wěn)定性較高、易于實(shí)現(xiàn)。 CVT方法的缺點(diǎn):由于沒(méi)有考慮太陽(yáng)能電池溫度對(duì)開路電壓的影響,當(dāng)電池溫度變化較大時(shí)能量損失較大。 CVT方法只是一種近似的最大功率跟蹤方法,實(shí)用在環(huán)境溫度變化不大、日照穩(wěn)定的地區(qū)的小型光伏系統(tǒng)。 一個(gè)簡(jiǎn)單簡(jiǎn)單的方法,可在電池板附近設(shè)置環(huán)境溫度檢測(cè),根據(jù)環(huán)境溫度值與經(jīng)驗(yàn)來(lái)修正Um值,可在一定程度上彌補(bǔ)溫度變化帶來(lái)的功率損失。 |
| 擾動(dòng)觀察法(Perturbation and Observation method) |
擾動(dòng)觀察法也稱為登山法,是一個(gè)自然尋優(yōu)過(guò)程,目前應(yīng)用較多。其原理是在光伏陣列正常工作時(shí),每隔一定的時(shí)間用較小的步長(zhǎng)改變太陽(yáng)能電池的輸出電壓,方向可以是增加也可以是減少,并檢測(cè)功率變化方向,來(lái)確定尋優(yōu)方向,如果輸出功率增加,那么繼續(xù)按照上一周期的方向繼續(xù)“干擾”,如果輸出功率減小,就改變其擾動(dòng)方向,如此不停地周而復(fù)始,使太陽(yáng)能電池板動(dòng)態(tài)地工作在最大功率點(diǎn)的附近。 顯然系統(tǒng)工作點(diǎn)無(wú)法穩(wěn)定運(yùn)行在最大功率點(diǎn)上,只能在最大功率點(diǎn)附近振蕩運(yùn)行,而振蕩的幅值則由步長(zhǎng)決定。若擾動(dòng)步長(zhǎng)過(guò)大,跟蹤的速度快,但在最大功率點(diǎn)附近的振蕩幅度比較大,可能造成較大功率損失;若步長(zhǎng)過(guò)小,功率損失會(huì)小些,但跟蹤的速度會(huì)慢,系統(tǒng)的響應(yīng)速度降低。當(dāng)日照隨時(shí)間變化不快時(shí),此算法是非常有效;當(dāng)光強(qiáng)發(fā)生突變時(shí),可能得到錯(cuò)誤的跟蹤方向。如果步長(zhǎng)太小時(shí)會(huì)難以引起功率變化,無(wú)法判別尋優(yōu)方向。 擾動(dòng)觀察法的優(yōu)點(diǎn):原理簡(jiǎn)單,測(cè)量參數(shù)少,轉(zhuǎn)換效率高,硬件實(shí)現(xiàn)較為方便。 擾動(dòng)觀察法的缺點(diǎn):步長(zhǎng)對(duì)控制精度和速度影響較大,系統(tǒng)工作點(diǎn)無(wú)法穩(wěn)定在最大功率點(diǎn)上,會(huì)導(dǎo)致部分功率損失;對(duì)外界環(huán)境變化的響應(yīng)能力較差,故只適用于光強(qiáng)變化小的環(huán)境。 改進(jìn)方法是在系統(tǒng)起動(dòng)初期,或擾動(dòng)引起的功率變化太小時(shí)可加大擾動(dòng)步長(zhǎng),以盡快找到尋優(yōu)方向,待系統(tǒng)穩(wěn)定后再減小步長(zhǎng)。這樣可減小功率的損失。 |
| 電導(dǎo)增量法(Incremental ConductanceMethod) |
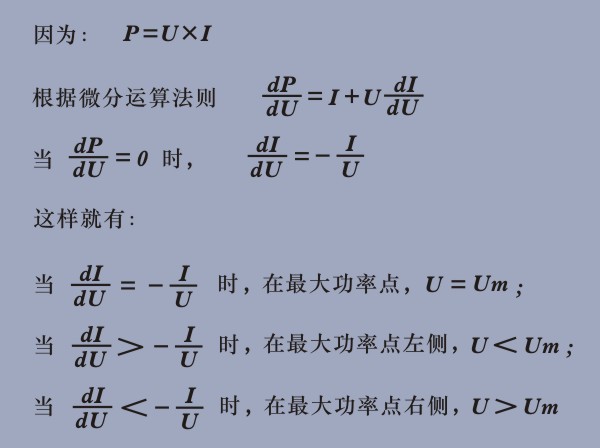
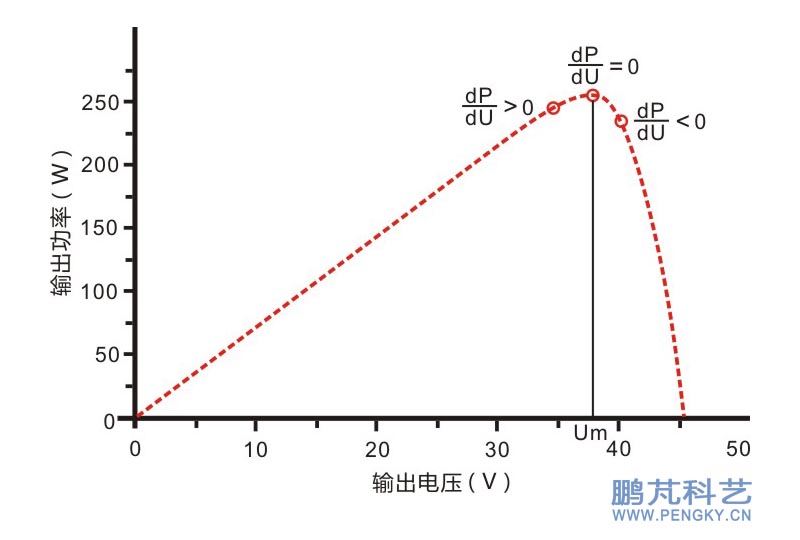
電導(dǎo)增量法是通過(guò)比較太陽(yáng)能電池的瞬時(shí)電導(dǎo)和電導(dǎo)的變化量來(lái)計(jì)算最大功率點(diǎn)的方法,目前應(yīng)用也較多,其原理如下。 在圖5中有一條太陽(yáng)能電池板的電壓功率曲線,曲線上有3個(gè)點(diǎn),在曲線最頂處是最大功率點(diǎn),對(duì)應(yīng)電壓為Um,根據(jù)數(shù)學(xué)知識(shí),在最大功率點(diǎn)曲線的斜率為零,也就是dp/du=0;在電池板輸出電壓大于Um時(shí),曲線的斜率為負(fù),dp/du<0,如右側(cè)點(diǎn);在電池板輸出電壓小于Um時(shí),曲線的斜率為正,dp/du>0,如左側(cè)點(diǎn)。 |
|
| 于是可以通過(guò)判斷dp/du的值來(lái)判斷電池板的工作點(diǎn)位置。 |
 |
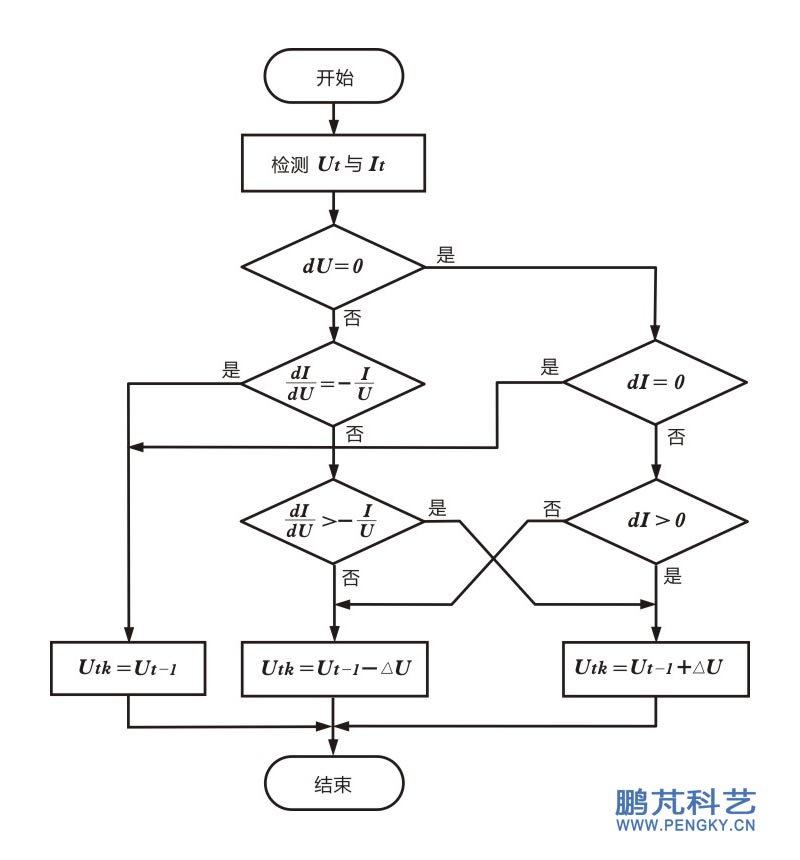
計(jì)算的主要流程見圖6,當(dāng)前時(shí)刻t的電壓為Ut,電流為It;上次計(jì)算后進(jìn)行控制的電壓為Ut-1,電流為It-1;ΔU是電壓修正的步長(zhǎng),Utk為當(dāng)前計(jì)算后應(yīng)控制的電壓。 首先判斷dU與dI是否同時(shí)為0,同時(shí)為0則表示已工作在最大功率點(diǎn),保持Utk值仍為Ut-1值;如果dU=0,dI≠0,則通過(guò)判斷dI的正負(fù)來(lái)修正Ut-1值為Utk值;如果dU=0,則根據(jù)dI/dU與-I/U之間的大小關(guān)系來(lái)修正Ut-1值為Utk值。 |
|
電導(dǎo)增量法的優(yōu)點(diǎn):在光照和溫度變化時(shí),太陽(yáng)能電池陣列的輸出電壓能平穩(wěn)地追隨環(huán)境變化,使太陽(yáng)能光伏陣列最后穩(wěn)定在最大功率點(diǎn)附近的某個(gè)點(diǎn),而不是來(lái)回的跳動(dòng),電壓波動(dòng)較擾動(dòng)觀察法小,控制精確,響應(yīng)速度較快。 電導(dǎo)增量法的缺點(diǎn):對(duì)硬件的要求特別是對(duì)傳感器的精度要求比較高,整個(gè)系統(tǒng)造價(jià)較高。
以上介紹了最大功率點(diǎn)跟蹤控制常用算法恒定電壓法、電導(dǎo)增量法、擾動(dòng)觀測(cè)法的原理,除此之外還有基于擾動(dòng)觀測(cè)法的改進(jìn)自適應(yīng)算法、利用數(shù)學(xué)模型或查表方法確定最大功率點(diǎn)的方法等等,本課件就不一一介紹了,有興趣的網(wǎng)友請(qǐng)另參考資料。 |
| 返回上一頁(yè) | Back to Previous Page |
